基于libLAS库将las格式的点云文件转化为pcd格式点云并进行显示!
1.示例代码:
1 |
|
2.实验结果:
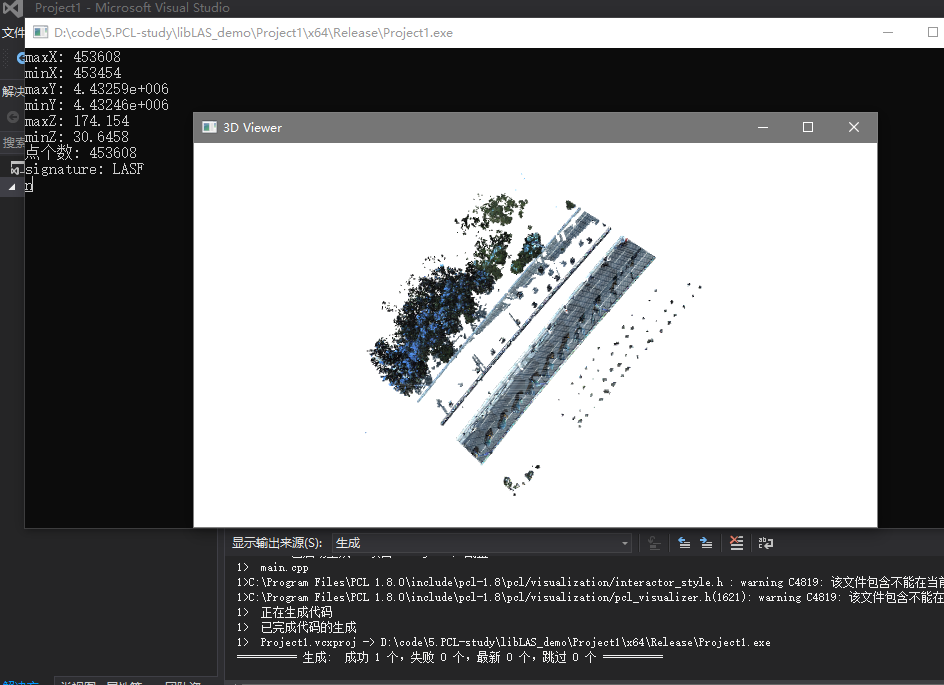
3.备注:
1).参考:点云库PCL从入门到精通 书中配套案例(该链接中第三章目录下含有编译好的libLAS库,可直接下载使用)。
2).依赖库:PCL1.8、libLAS。
基于libLAS库将las格式的点云文件转化为pcd格式点云并进行显示!
1 |
|
1).参考:点云库PCL从入门到精通 书中配套案例(该链接中第三章目录下含有编译好的libLAS库,可直接下载使用)。
2).依赖库:PCL1.8、libLAS。